Comment configurer et utiliser le Rotrics DexArm avec LightBurn
- Tehoor Marjan
- Création
- 21 janvier 2025
Table des Matières
Le Rotrics DexArm est une addition intrigante et originale dans le monde de l’impression 3D et de la découpe laser. Contrairement aux découpeuses laser traditionnelles, c’est un bras robotique de petite taille à 4 axes avec une grande modularité, lui permettant de passer facilement de la gravure laser à l’impression 3D, le tracé et même la préhension d’objets.
Cette flexibilité s’accompagne de défis particuliers, notamment lorsqu’il s’agit de l’intégrer à des logiciels comme LightBurn, principalement conçu pour des configurations conventionnelles.
Malheureusement, si vous n’en possédez pas encore un, je ne peux pas vous le recommander. Rotrics a abandonné son produit il y a quelque temps, ne s’occupant plus que des ventes. Le logiciel Rotrics Studio est notoirement bogué et pauvre en fonctionnalités. Mais si vous êtes l’un des heureux (ou malheureux) propriétaires de DexArm, ne vous inquiétez pas : il y a de l’espoir !
Aujourd’hui, je vais vous guider dans la configuration du DexArm sur LightBurn, un puissant logiciel pour la découpe et la gravure laser. Cet article est une mise à jour de la page de configuration LightBurn sur le wiki fandom.
Important
Utilisateurs Linux
Le support de LightBurn sur Linux a pris fin après la version 1.7.00. Si vous utilisez Linux, gardez cela à l’esprit avant un éventuel achat.
Première étape
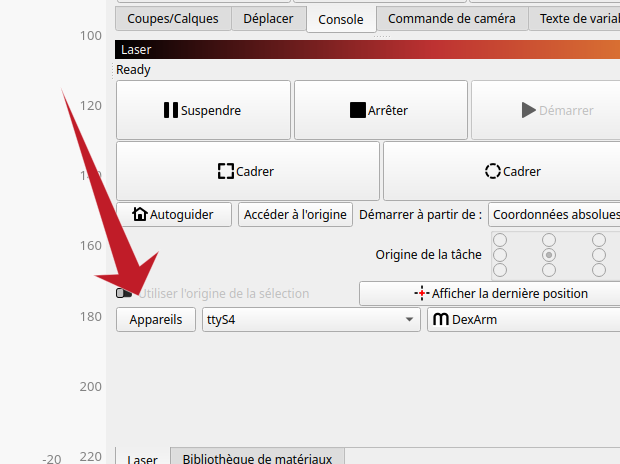
Quand vous ouvrez LightBurn pour la première fois, il va automatiquement vous inviter à créer un nouveau périphérique. Sinon, vous pouvez accéder manuellement à la configuration en cliquant sur le bouton Appareils situé dans la barre latérale du panneau Laser.
TL;DR : Importer le fichier
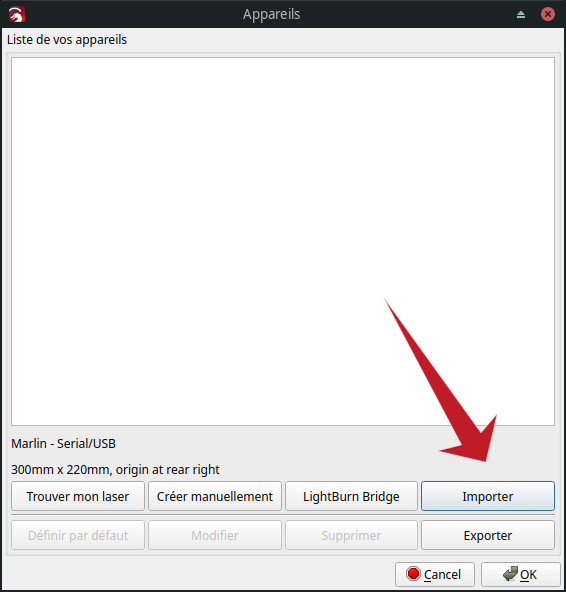
Si vous êtes pressé et voulez une configuration rapide, vous pouvez sauter le processus manuel et utiliser mon fichier préconfiguré. Téléchargez-le et importez-le dans LightBurn :
Et c’est tout ! Vous pouvez passer directement à comment utiliser la configuration.
Configuration manuelle
Créer un nouveau périphérique
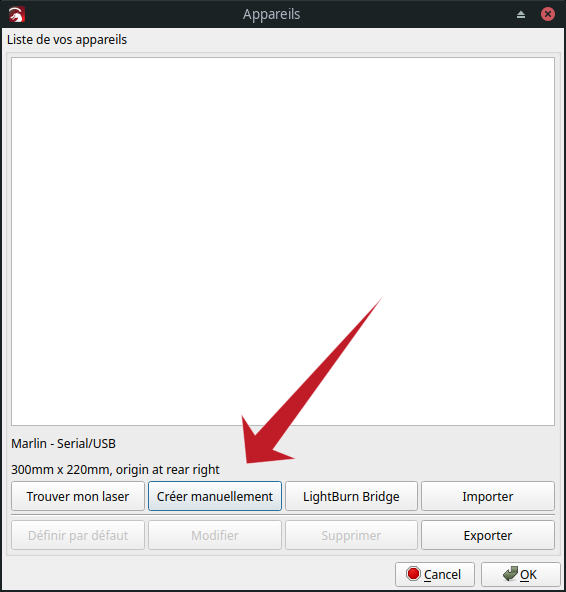
Choisissez l’option Créer manuellement en utilisant l’assistant.
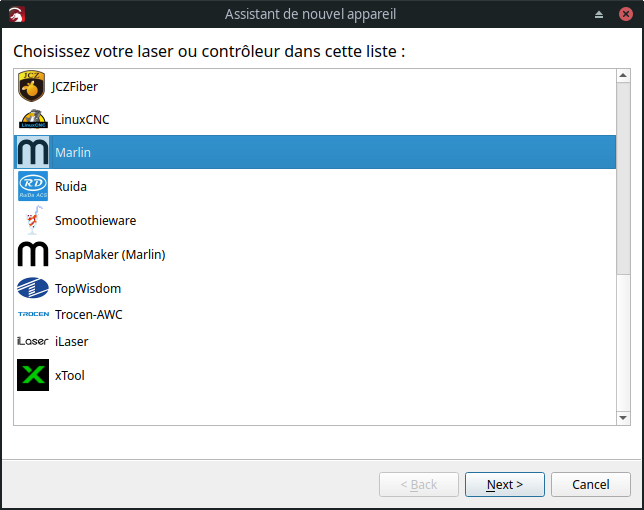
Pour le type de contrôleur, choisissez Marlin. Le firmware du DexArm est une version personnalisée du firmware open-source populaire Marlin.
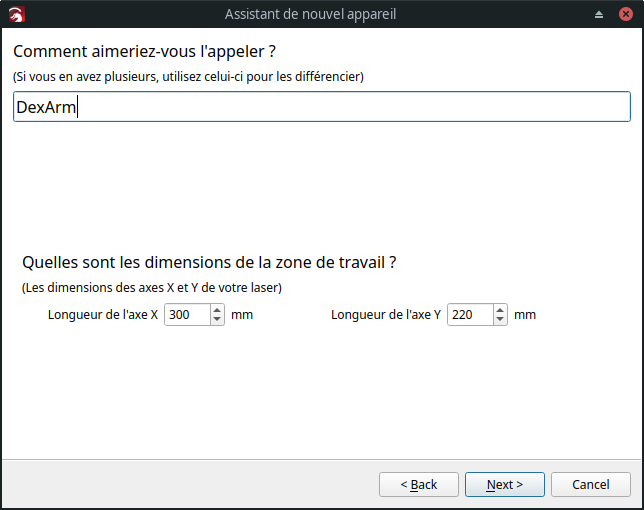
Ensuite, donnez un nom à votre périphérique (par exemple, “DexArm”). Réglez les dimensions sur $300\,\text{mm}$ (axe X) et $220\,\text{mm}$ (axe Y). Cette configuration garantit une compatibilité avec les avertissements de l’espace de travail de LightBurn, même si le bras ne pourra pas atteindre physiquement les coins les plus éloignés.
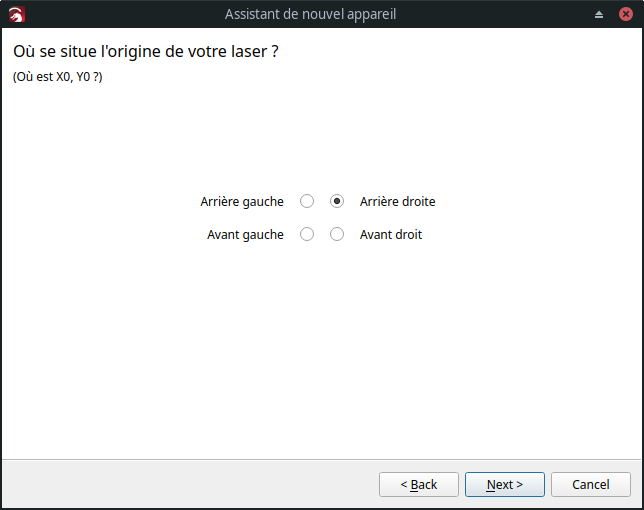
Pour l’origine du laser, choisissez Arrière Droit. Bien que ce ne soit pas exact, c’est l’option la plus intuitive compte tenu des limites de LightBurn.
Configurer les paramètres du périphérique
Allez dans Éditer > Paramètres du périphérique pour ajuster certains paramètres importants.
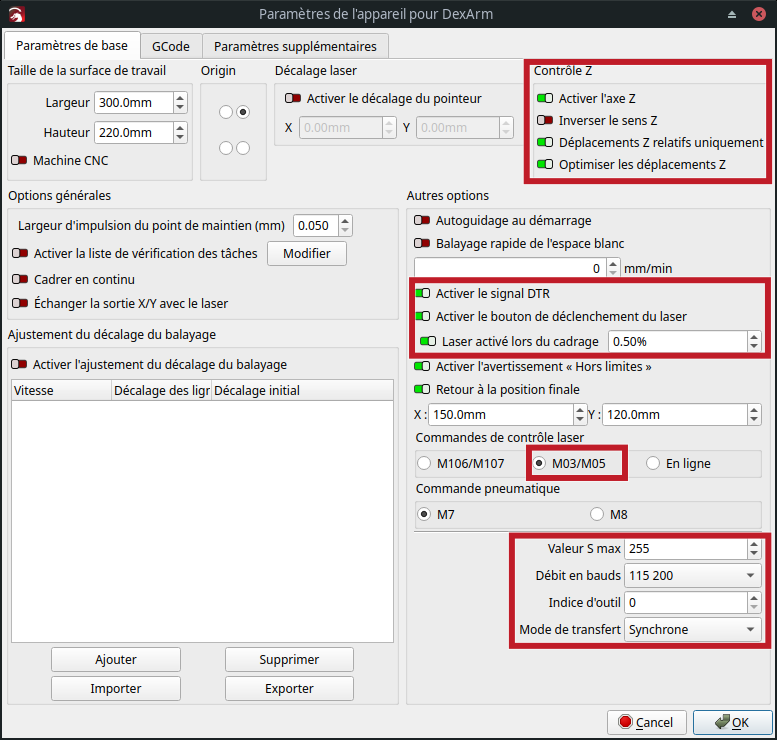
- Activez le contrôle de l’axe Z.
- Activez le bouton de déclenchement du laser.
- Optionnel : Activez Laser activé lors du cadrage et définissez la puissance
du laser à
0.50%. - Sélectionnez
M03/M05comme commandes d’allumage/extinction du laser. - Vérifiez que le débit en bauds est réglé sur
115200. - Réglez le mode de transfert sur Synchrone.
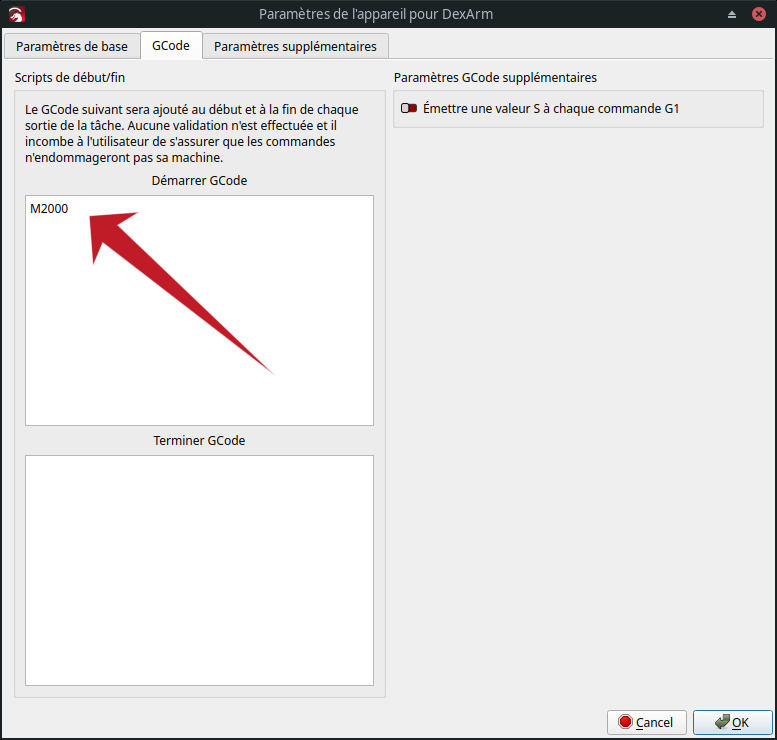
Dans l’onglet GCode, vous pouvez ajouter la commande M2000 au démarrage pour
garantir que le bras fonctionne en mode linéaire. Bien que LightBurn utilise
principalement des commandes G1, cela agit comme une mesure de sécurité
supplémentaire.
Macros
Activez le panneau Console via le menu Fenêtre. Dans l’onglet Console, vous pouvez entrer des commandes G-code personnalisées ou configurer des macros (boutons exécutant des commandes).
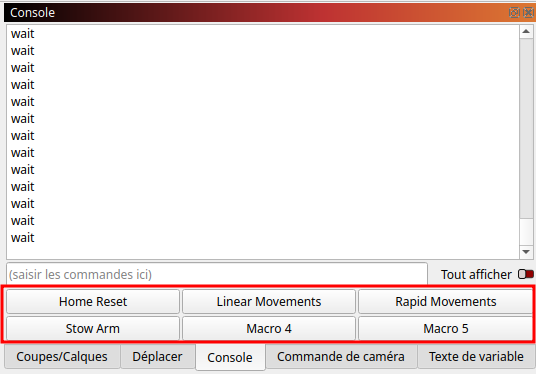
Pour configurer une macro, cliquez avec le bouton droit sur un bouton dans le Panneau Console et entrez un titre et le contenu du G-code.

Configurez les boutons suivants :
| Intitulé du bouton | Contenu de la macro |
|---|---|
| Home Reset | |
| Linear Movements | |
| Rapid Movements | |
| Stow Arm | |
Important
Pour la macro Stow Arm, vous devrez peut-être personnaliser les valeurs.
Éteignez le bras, placez-le manuellement en position repliée, rallumez-le, et
envoyez la commande M893 dans le Panneau Console. Le bras retournera une
commande M894 avec les valeurs nécessaires.

Utilisation
Préparation
Allumez le DexArm et ouvrez LightBurn.
Si ce n’est pas encore fait, activez le Panneau Console via le menu Fenêtre. Une fois activé, un nouvel onglet appelé Console apparaît dans la barre latérale.
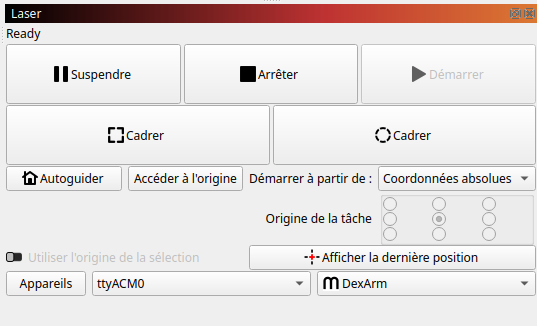
Dans le panneau Laser, sélectionnez le port de communication correct (par
exemple /dev/ttyACMx sur Linux, COMx sur Windows, /dev/tty.x sur Mac) et
choisissez le périphérique DexArm.
Assurez-vous également que Démarrer à partir de est réglé sur Coordonnées Absolues.
À l’aide du panneau Console, cliquez sur Home Reset. ⚠️ Le bras bouge ! Cela placera le bras au centre de la zone de travail.
Info
La macro Home Reset garantit que le bras est aligné avec le système de coordonnées de LightBurn. Elle effectue les actions suivantes :
M1112: Déplace le bras à la position d’origine usine.M888 P3: Définit l’outil actuel comme étant le laser. Cette information est nécessaire pour que le bras traduise les coordonnées cartésiennes en rotations des axes, car la position exacte de la sortie de l’outil varie légèrement selon qu’il s’agit du faisceau laser, de la buse d’extrusion, du porte-crayon, etc.
Remarque : Malgré la documentation plus ancienne suggérantM880, les nouveaux firmwares nécessitent la commandeM888pour la sélection de l’outil.G92 X150 Y130 Z0: Ajuste les coordonnées de travail pour faire de la position actuelle $X = 150\,\text{mm}$, $Y = 130\,\text{mm}$, $Z = 0\,\text{mm}$.
Le bras est maintenant prêt à être utilisé.
Zone de travail
Même si on a configuré la zone de travail pour une taille de $300\,\text{mm} \times 220\,\text{mm}$, il faut savoir qu’à peu de choses près, le bras ne pourras pas descendre en-dessous de $Y = 10\,\text{mm}$ lorsqu’il est droit ($X \approx 150\,\text{mm}$).
En revanche, les angles situés dans la zone de travail en haut de la fenêtre seront bien accessibles ($(0, 0)$ et $(300, 0)$). Enfin, si le bras peut atteindre facilement $y = 220\,\text{mm}$ droit devant lui, les angles les plus éloignés (en bas sur l’écran) ne seront pas accessibles ($(0, 220)$ et $(300, 220)$).
Vous pouvez vérifier avec l’outil position de LightBurn que les endroits les plus éloignés et les plus proches sur votre gravure sont accessibles avec le bras avant de lancer l’impression réelle.
Calibration pour l’impression et la découpe
Consultez la documentation LightBurn Print and Cut ou regardez la vidéo :
Info
Le DexArm possède deux modes de mouvement que vous pouvez sélectionner à l’aide des boutons macro : Rapid Movements ou Linear Movements.
- En mode Linear Movements, la tête du laser dessine une ligne droite entre le point de départ et le point d’arrivée. Ce mode est indispensable pour l’impression ou la découpe. Cependant, du point de vue des axes de rotation, cela peut impliquer des mouvements d’aller-retour, inutiles si vous voulez simplement déplacer le bras.
- En mode Rapid Movements, le bras effectue des mouvements plus directs et rapides, ce qui est pratique pour les ajustements et la calibration.
Sélectionnez Rapid Movements pour effectuer des réglages ou des calibrations. Sélectionnez Linear Movements uniquement lorsque vous gravez ou découpez réellement. Par défaut, l’appareil passe automatiquement en mode Linear Movements au début d’une tâche d’impression.
Ranger le bras
Avant d’éteindre le DexArm, utilisez la macro Stow Arm. Cela permet au bras de se rétracter dans une position sûre, évitant tout dommage lorsqu’il est mis hors tension. (Lorsque le couple est relâché par le moteur et que le bras est étendu, son poids peut lui faire heurter la table ou une pièce finie, endommageant à la fois le bras et le support.)
Et voilà — votre DexArm est configuré et prêt à créer !